
|
|
Telemanipulation for Micromanipulation and MicrosurgeryOn this page... (hide) Retinal MicrosurgeryRetinal microsurgery procedures are at the limits of human ability. An error of few micrometers can cause the instrument to exert damaging force on the retina, causing loss of vision at the spot due to hemorrhage. Tactile feedback is known to improve manipulation effciency, but the forces experienced during retinal surgeries are far below the sensable limit for humans. Hence, the surgeon has to rely on visual feedback only. To further complicate the problem, patient movement has to be accounted for by the surgeon as movement due to patient breathing is a common problem. Retinal surgery begins with a vitrectomy (the removal of the vitreous), which relieves the traction on the retina and enables surgical instruments to gain access to the retina. Three trocars through the sclera are prepared, one each for a fiber optic light source, a suction needle, and for the different instruments that will be used during the surgery. Using instruments inserted through the trocar, tasks such as epiretinal-membrane peeling are performed using a sequence of abrasive, cutting, and pulling manipulations. 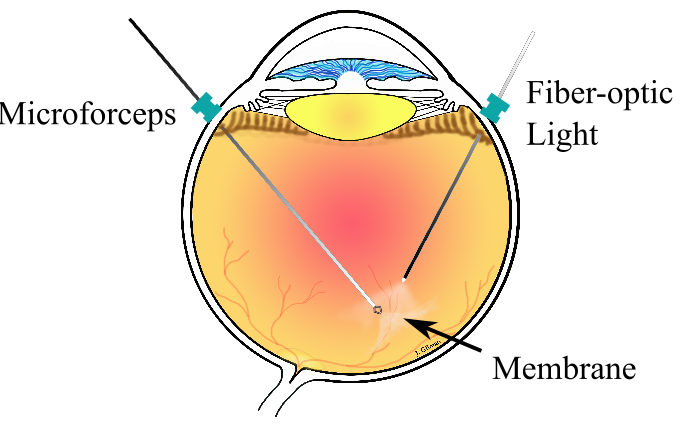 Membrane peeling surgery being performed by instruments inserted in the eye. Selected PublicationsM. Nambi, P. S. Bernstein, and J. J. Abbott, "Effect of Haptic-interface Virtual Kinematics on the Performance and Preference of Novice Users in Telemanipulated Retinal Surgery
," IEEE Robotics and Automation Letters, 2(1):64-71, 2017.
M. Nambi, P. S. Bernstein, and J. J. Abbott, "A Compact Telemanipulated Retinal-surgery System that uses Commercially Available Instruments with a Quick-change Adapter," J. Medical Robotics Research, 1(2):1630001, 2016.
M. Nambi, P. S. Bernstein, and J. J. Abbott, "A Compact Retinal-surgery Telemanipulator that uses Disposable Instruments," In N. Navab et al. (Eds.): MICCAI 2015, Part I, LNCS 9349, pp. 258�265, Springer, 2015.
CollaboratorsSponsorsWe would like to thank Intuitive Surgical. The development of the retinal telemanipulator would not have been possible without their support.
Intuitive Tele-operation of Micromanipulators with Piezoelectric Stick-slip Actuators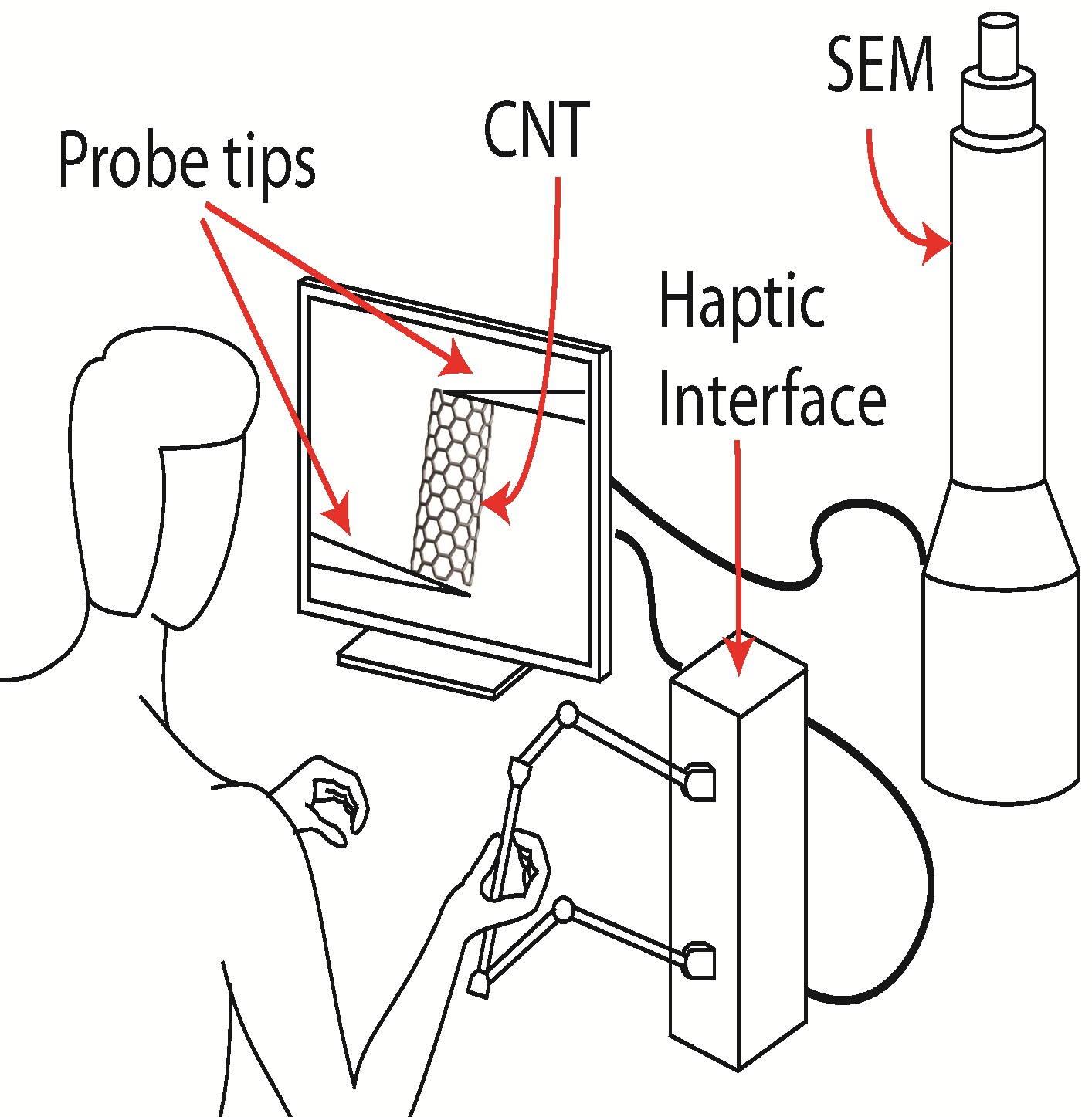
Micro/Nano-manipulation deals with handling of extremely small objects on the order of 10-3 to 10-9m. Development of scanning and transmission electron microscopes (SEMs/TEMs) has enabled researchers to image and manipulate objects as small as 1\,nm in size. However, due to difficulties in simultaneous imaging and manipulating, micro/nano-manipulation is still a laborious task requiring great patience. The goal of our research is to enable tele-operated rate control of micro/nano-manipulators without relying on any feedback from the vision system, other than the human user looking at the microscope image. This involves obtaining empirical models for the micro/nano-manipulator joints so that reliable position estimates can be obtained in the absence of feedback and development of control methods to move the end-effector using position estimates obtained from the open-loop models. Through intelligent algorithm development and drift compensation techniques we can greatly improve the efficiency with which such piezoelectric stick-slip actuators are operated. 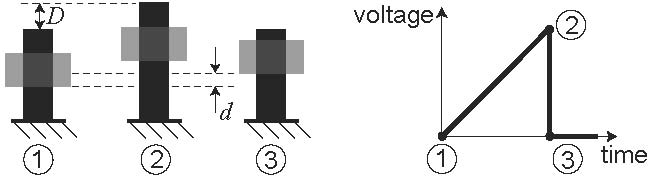 Functional description of a piezoelectric stick-slip actuator. Piezoelectric stick-slip actuators have become the foundation of modern micro/nano-manipulation due to their simple structure, high positional accuracy, unlimited movable distance, and high stability as they are supported by guiding surfaces. These actuators consist of a piezoelectric element and a sliding mass that moves relative to the piezoelectric element. A saw-tooth voltage is applied to the piezoelectric element. As the voltage slowly increases from 1 to 2, the piezoelectric element stretches by a distance D, and due to stick-slip friction between the piezoelectric element and the sliding mass, the sliding mass also advances (stick phase). When the voltage is quickly reduced from 2 to 3, the piezoelectric element quickly shrinks, but the inertia of the sliding mass prohibits it from moving backward as quickly, resulting in a net forward displacement of the sliding mass of d < D (slip phase). Typically, these actuators have no sensor feedback, and hence, the individual joints of the manipulators are controlled open-loop, using one knob per joint. It is not always clear what combination of joint commands will lead to a desired end-effector movement from only a microscope image. In addition, manipulators are often mounted on moving stages and on different surfaces at varying angles. The user observing the end-effector of such a manipulator under a microscope has to perform the difficult task of mapping the image frame to his/her egocentric frame of reference. Use of multiple manipulators further complicates the situation. Thus, micro/nano-manipulation is currently unintuitive and time consuming.
Selected PublicationsA. Damani, M. Nambi, and J. J. Abbott, "An Empirical Study of Static Loading on Piezoelectric Stick-Slip Actuators of Micromanipulators," Int. Symp. Experimental Robotics, 2012.
M. Nambi, A. Damani, and J. J. Abbott, "Toward Intuitive Teleoperation of Micro/Nano-Manipulators with Piezoelectric Stick-Slip Actuators," IEEE/RSJ Int. Conf. Intelligent Robots and Systems, pp. 445-450, 2011.
|