
|
|
Haptic Virtual Fixtures for Task Assistance in TelemanipulationThis research was conducted in Allison Okamura's lab at Johns Hopkins University. 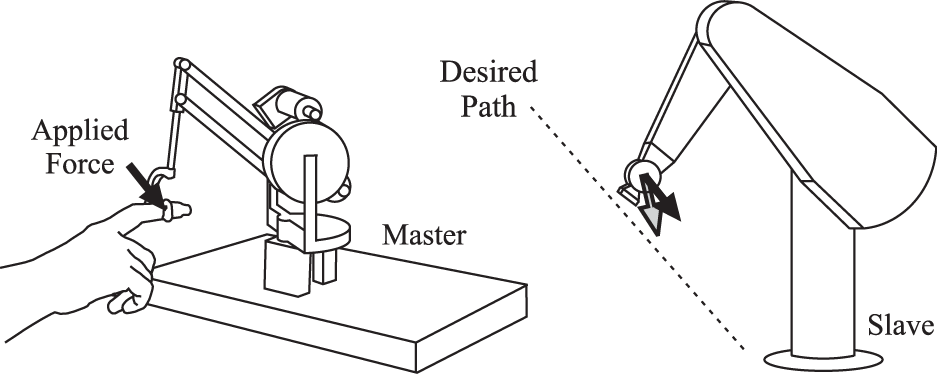 Teleoperation, which is the control of remote robots, can be used to accomplish a great number of tasks that are too remote, highly scaled, or hazardous for direct human manipulation. It is particularly advantageous in unstructured environments, where completely autonomous robotic systems cannot be used due to the limitations of artificial intelligence, sensor data interpretation, and environment modeling. "Bilateral telemanipulation" typically refers to a teleoperation system where a human operator manipulates a "master" robotic device, and a "slave" device emulates the behavior of the master, with some form of haptic (force and/or tactile) feedback to the operator. Although haptic feedback can improve performance of telemanipulated tasks, traditional teleoperation systems are not able to provide any intelligent assistance to the human operator. Thus, we are developing novel human-machine collaborative control laws, called "virtual fixtures," which bridge the gap between strictly autonomous and strictly teleoperated systems. The term "virtual fixture" refers to a general class of guidance modes, implemented in software, that help a human-machine collaborative system perform a task by limiting movement into restricted regions and/or influencing movement along desired paths. The potential benefit of virtual fixtures is safer and faster operation. Virtual fixtures attempt to capitalize on the accuracy of robotic systems, while maintaining a degree of operator control. I worked with master/slave teleoperators. In telemanipulation, a user operates a robot that is at some distant location (it could be thousands of miles, or in the same room). In master/slave telemanipulation, rather that controlling the distant (slave) robot with a joystick or a keyboard, the user moves an identical (or at least similar) master robot, and the slave then follows its movement. Selected PublicationsJ. J. Abbott and A. M. Okamura, "Pseudo-admittance Bilateral Telemanipulation with Guidance Virtual Fixtures," Int. J. Robotics Research, 26(8):865-884, 2007.
J. J. Abbott, P. Marayong, and A. M. Okamura, "Haptic Virtual Fixtures for Robot-Assisted Manipulation," In S. Thrun, R. Brooks, and H. Durrant-Whyte, editors, Robotics Research: Results of the 12th International Symposium ISRR, pp. 49-64. Springer, 2007.
J. J. Abbott and A. M. Okamura, "Stable Forbidden-Region Virtual Fixtures for Bilateral Telemanipulation," ASME J. Dynamic Systems, Measurement, and Control, 128(1):53-64, 2006.
J. J. Abbott, G. D. Hager, and A. M. Okamura, "Steady-Hand Teleoperation with Virtual Fixtures," IEEE Int. Workshop on Robot and Human Interactive Communication (RO-MAN), pp. 145-151, 2003.
J. J. Abbott and A. M. Okamura, "Virtual Fixture Architectures for Telemanipulation," IEEE Int. Conf. Robotics and Automation, pp. 2798-2805, 2003.
|