
|
|
Gait Rehabilitation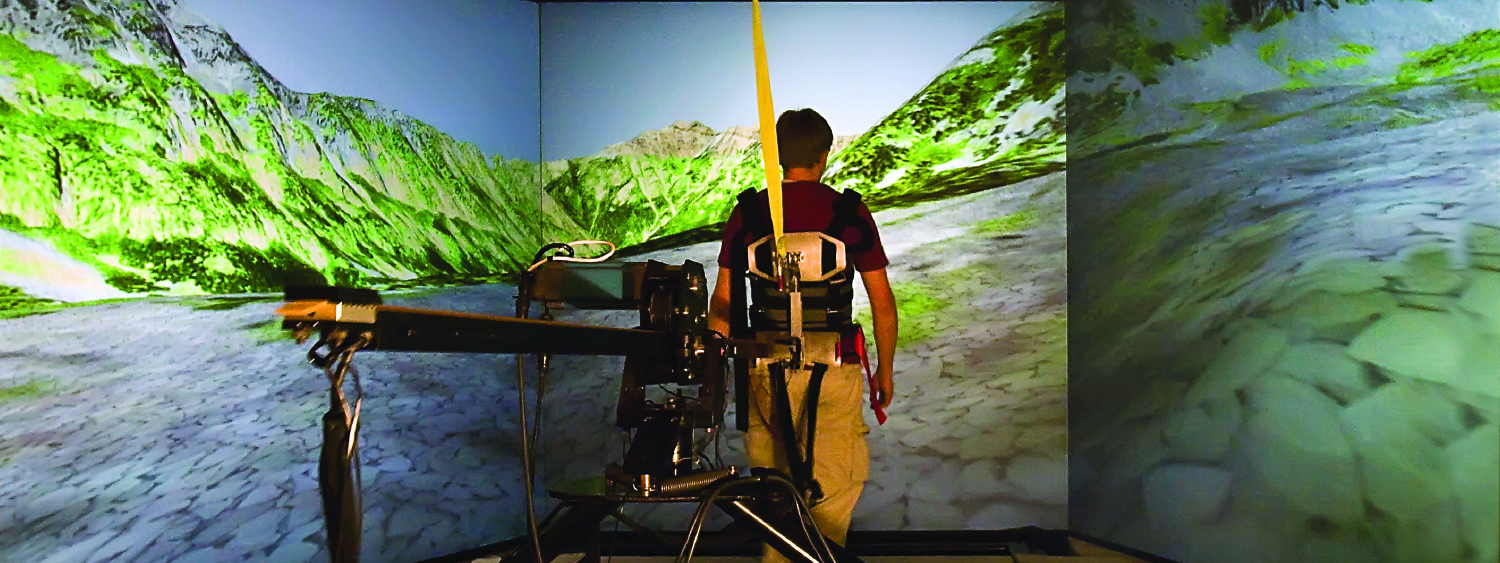 The Treadport is an immersive virtual environment at the University of Utah. We are exploring how the Treadport might be used in the rehabilitation of patients learning to walk again after spinal-cord injuries or other disorders. This local news segment features the use of the Treadport for rehabilitation of patients with incomplete spinal-chord injuries.
February 26, 2011: KUTV News, U: Virtual Reality Treadmill Helping Spinal Cord Injury Patients CollaboratorsPublicationsB. Hejrati, A. S. Merryweather, and J. J. Abbott, "Generating Arm-swing Trajectories in Real-time Using a Data-driven Model for Gait Rehabilitation with Self-selected Speed", IEEE Trans. Neural Systems and Rehabilitation Engineering, 26(1):115-124, 2018.
B. Hejrati, S. Chesebrough, K. B. Foreman, J. J. Abbott, and A. S. Merryweather, "Comprehensive Quantitative Investigation of Arm Swing During Walking at Various Speed and Surface Slope Conditions," Human Movement Science, 49:104-115, 2016.
O. R. Barnes, B. Hejrati, and J. J. Abbott, "An Underactuated Wearable Arm-swing
Rehabilitator for Gait Training," IEEE Int. Conf. Robotics and Automation, pp. 4998-5003, 2015.
B. Hejrati, K. L. Crandall, J. M. Hollerbach, and J. J. Abbott, "Kinesthetic Force Feedback and Belt Control for the Treadport Locomotion Interface," IEEE Trans. Haptics, 8(2):176-187, 2015.
B. Hejrati, D. Hull, J. Black, J. J. Abbott, and J. M. Hollerbach, "Investigation of the Treadport for Gait Rehabilitation of Spinal Cord Injury," Int. Conf. IEEE Engineering in Medicine and Biology Society, pp. 4553-4558, 2012. SponsorsThis material is based in part upon work supported by the National Science Foundation under Grant No. 1208637. Any opinions, findings, and conclusions or recommendations expressed in this material are those of the author(s) and do not necessarily reflect the views of the National Science Foundation. |