
|
|
Haptic StabilityOn this page... (hide) This research was conducted in Allison Okamura's lab at Johns Hopkins University. 1. Effects of Position Quantization and Sampling Rate on Virtual-Wall PassivityA virtual wall is the most common building block used in haptic virtual environments. It is typically implemented as a spring or spring-damper surface; when the haptic device penetrates past the virtual wall, a force is commanded that is proportional to the depth of penetration. To make a virtual environment feel like real materials (steel, wood, etc.) we would like to make virtual walls feel very stiff. However, making virtual walls too stiff can lead to instabilities where the haptic device vibrates against the virtual wall, destroying any illusion of reality. A passive system is a system that is incapable of generating energy (that is, it can only dissipate and store energy). All inanimate objects in the natural world are passive, and humans know how to interact with them in a natural way. The thought is, if we make robotic systems that are passive, then humans will know how to naturally interact with them as well. 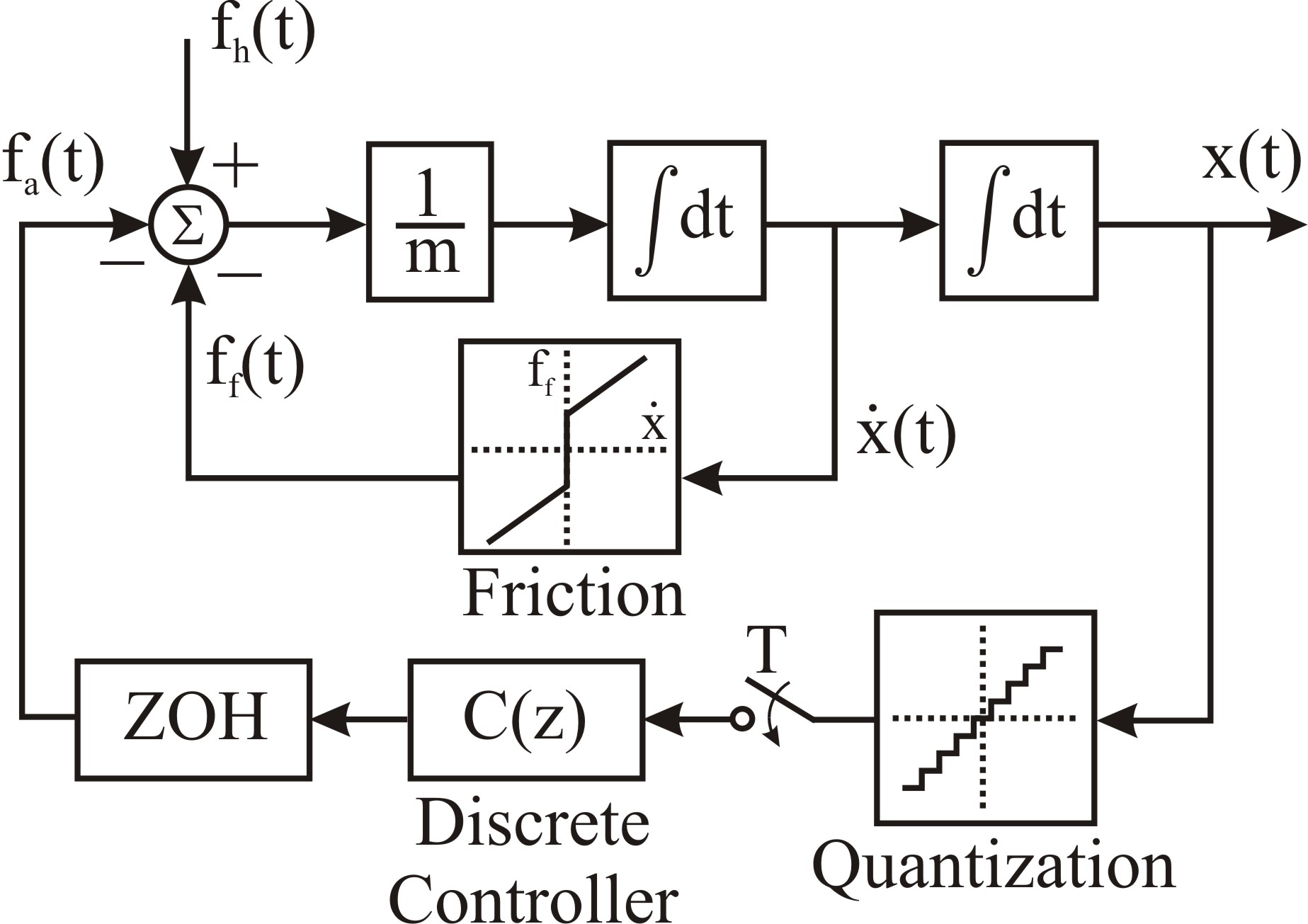 Previous work has considered the interplay of sampling rate (of the computer and A/D running the haptic virtual environment) and viscous friction in the joints of the haptic device. In this work, we take the next step, and additionally consider both the effects of position quantization (due to measuring robot position with an optical encoder, which is standard practice) and Coulomb friction (making the overall friction model much more accurate for modeling motors, etc.). We consider the haptic device, implementing a basic spring virtual wall, using a model that relates the force applied by the user fh to the position of the haptic device x. The result of our analysis is a simple condition to guarantee passivity of the virtual wall system shown: K < min(2b/T , 2fc/Delta) where K is the virtual wall stiffness in {N/m}, b is the viscous friction in {Ns/m}, fc is the Coulomb friction in {N/m}, and Delta is the resolution of the encoder in {m}. The most important result of this research is that the term based on Coulomb friction and encoder resolution is typically the dominant (i.e., smaller) term, making the consideration of these effects very important for accurate passivity analysis. 1.1 Selected PublicationsJ. J. Abbott and A. M. Okamura, "Effects of Position Quantization and Sampling Rate on Virtual-Wall Passivity,'' IEEE Trans. Robotics, 21(5):952-964, 2005.
2. Stable Forbidden-Region Virtual Fixtures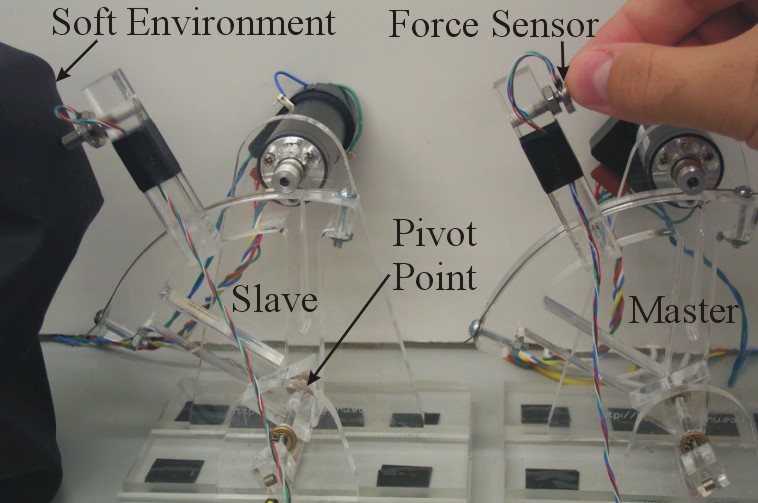 A forbidden-region virtual fixture is constraint, implemented in software, that helps keep a robotic manipulator out of forbidden regions. Forbidden-region virtual fixtures have the potential to increase the safety of telemanipulated tasks. The problem is, stiff virtual fixtures (that is, those that are actually effective in keeping the slave robot out of forbidden-regions) can demonstrate unstable vibrations. Our research addressed this stability problem, and presented a new method to predict (and consequently, prevent) this instability. 2.1 Selected PublicationsJ. J. Abbott and A. M. Okamura, "Stable Forbidden-Region Virtual Fixtures for Bilateral Telemanipulation," ASME J. Dynamic Systems, Measurement, and Control, 128(1):53-64, 2006.
|