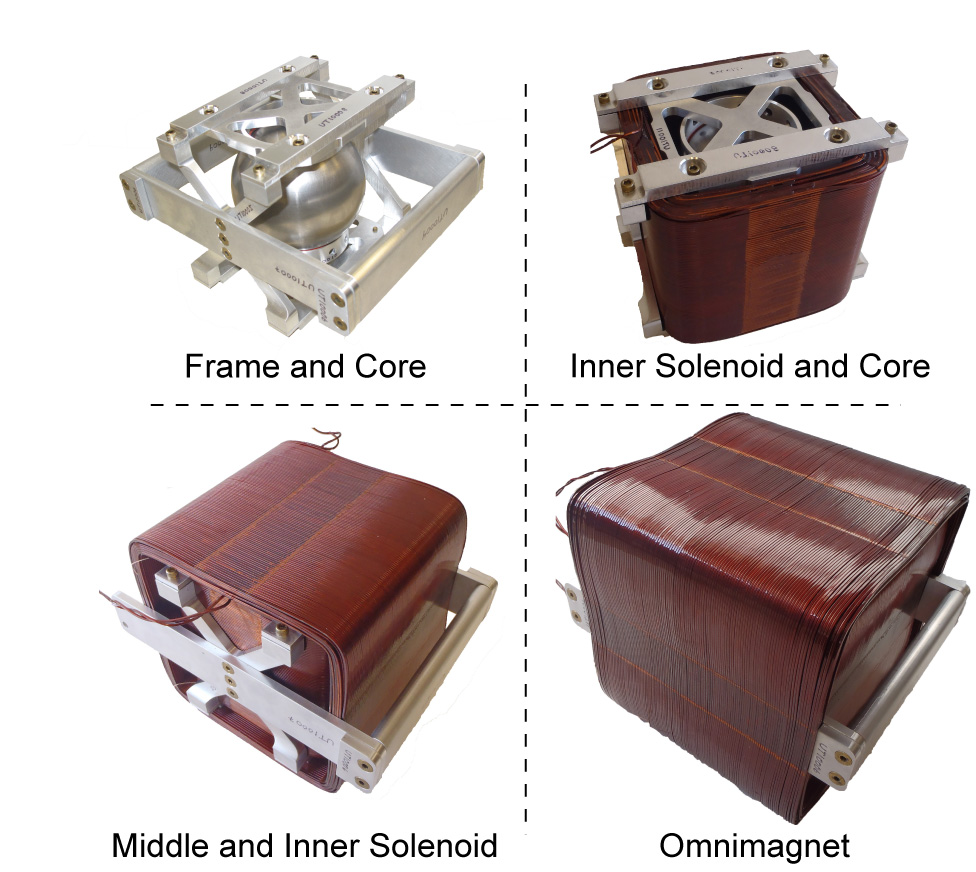
What is an Omnimagnet?
An Omnimagnet is three electromagnets that are all centered at the same point in space but point in three different directions. By controlling the current in each of the coils a magnetic dipole moment can be created in any direction of any desired strength. The three coils are designed so that the same current creates the same field in any direction.
The first presentation of the Omnimagnet was at the IEEE International Conference on Robotics and Automation in May 2013.
Generating Rotating Fields for Capsule Endoscopy and Other Tasks
Magnetic fields provide a method to apply forces and torques to medical devices without any mechanical connection. The main motivation for this research is in the area of capsule endoscopy. Traditional endoscopy requires a tethered endoscope and is an unpleasant procedure, current capsule endoscopy uses a pill with a camera to survey the gastrointestinal (GI) tract but without any orientation control. One main concern with current capsule endoscope procedures is that the capsule tumbles through the GI tract and may miss a critical issue. By applying control torques and forces to a small magnet inside the capsule we can allow the clinician to survey the GI without tumbling past key points.
⚠ (:youtube VVzkQrEraNc loop=1 fs=1:)
An endoscopic capsule could be propelled through the GI tract with a helical thread. By generating a rotating magnetic field at the location of the capsule, the capsule rotates and the thread moves it forward. This video is the first demonstration of this type of propulsion powered by an Omnimagnet.
⚠ (:youtube BazzrVi-bnw loop=1 fs=1:)
Rotating magnetic fields can also be used to roll a magnetic ball. In this video, the Omnimagnet is used to play the labyrinth game. The user selects a target point (seen as a blue dot in the inset video) and a closed-loop controller generates rotating fields to roll the ball toward the target. You see that the user had to reset the ball a few times (just like the real labyrinth game), but the Omnimagnet is capable of generating the appropriate propulsion to complete the entire maze.
⚠ (:youtube aCHbjM5pX-E loop=1 fs=1:)
The walls of the labyrinth and the lumen in the above videos provide a lot of structure to contain the manipulated device. In this video, we see that it is possible for an Omnimagnet to roll a ball on the table without any constraints, although the control is reduced. The ball is not drawn into the Omnimagnet uncontrollably as one might expect.
⚠ (:youtube 6cqDgJcebRk loop=1 fs=1:)
In this video, an Omnimagnet is used to roll a 1-millimeter magnetic bead in corn syrup, which simulates a 30-micrometer bead in water due to Reynolds-number equivalence. The bead is located on a horizontal slide positioned above the Omnimagnet, and the control is completely open-loop, meaning that the Omnimagnet does not know where the bead is, so it just assumes that the bead is always directly above the center of the Omnimagnet. We see that it is possible to manipulate microdevices over large distances using an Omnimagnet, leaving the workspace very unobstructed. In related work on magnetic micromanipulation, the workspace is typically completely surrounded by electromagnets.
Force Control
⚠ (:youtube YK7vRI3w-5I loop=1 fs=1:)
In this video, the Omnimagnet is used to apply forces (rather than rotating fields) to a floating permanent magnet. The magnet has its dipole pointing upward, and it is rigidly embedded in plastic that is floating on water. We see that forces toward, away from, and lateral to the Omnimagnet can be generated.
Multiple Omnimagnets: Modular and Reconfigurable Magnetic Manipulation
⚠ (:youtube SuKIJSmjHd4 loop=1 fs=1:)
This is a video associated with the paper "First Demonstration of a Modular and Reconfigurable Magnetic-Manipulation System" by Andrew J. Petruska, Joseph B. Brink, and Jake J. Abbott, to be presented at the 2015 IEEE International Conference on Robotics and Automation in Seattle, Washington. The video shows a capsule-endoscope-type device being manipulated by a set of Omnimagnets acting in concert. The Omnimagnets can be rearranged, and Omnimangets can be added or removed from the system, while maintaining control of the capsule. This is the first such demonstration of a modular and reconfigurable magnetic-manipulation system.
Selected Publications
A. J. Petruska, J. B. Brink, and J. J. Abbott, "First Demonstration of a Modular and Reconfigurable Magnetic-Manipulation System," IEEE Int. Conf. Robotics and Automation, 2015 (to appear).
A. J. Petruska, A. W. Mahoney, and J. J. Abbott, "Remote Manipulation with a Stationary Computer-Controlled Magnetic Dipole Source," IEEE Trans. Robotics, 30(5):1222-1227, 2014.
pdf
A. J. Petruska and J. J. Abbott, "Omnimagnet: An Omnidirectional Electromagnet for Controlled Dipole-Field Generation," IEEE Trans. Magnetics, 50(7):8400810(1-10), 2014.
pdf
Sponsors
This material is based in part upon work supported by the National Science Foundation under Grant No. 0952718. Any opinions, findings, and conclusions or recommendations expressed in this material are those of the author(s) and do not necessarily reflect the views of the National Science Foundation.
Special thanks to Advanced Motion Control and their University Outreach program for enabling our resources to be focused on the research and not on the support equipment. For more information please go to AMC's Website.