
|
|
Self-Assembling Swallowable Modular RobotsThis is work conducted in Brad Nelson's lab at ETH Zurich. 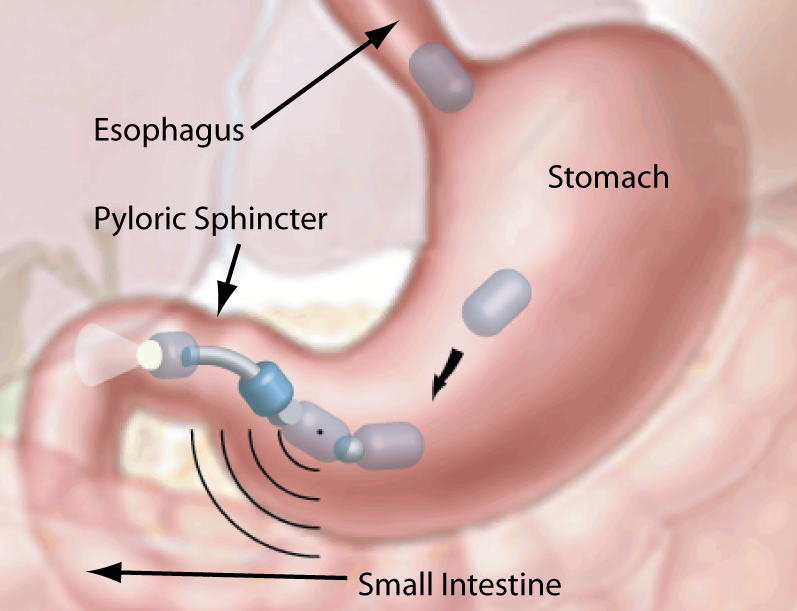 Capsule endoscopes such as the M2A by Given Imaging are gaining popularity is clinical use. Capsule endoscopes are swallowable cameras that move passively through the GI tract to diagnose problems such as bleeding and cancer. A great deal of robotics researchers are working towards adding functionality to capsule endoscopes, such as legs to provide controlled locomotion, or tools to diagnose pathologies. However, adding more functionality is difficult without making the capsule larger, and consequently more difficult to swallow. As part of the ARES project, we are working towards a swallowable modular robotic system. The goal is to make a system composed of small simple components that are easy to swallow, and that assemble inside the stomach or small intestine to form a larger structure with the desired functionality. Our research has largely focused on magnetic self-assembly. Selected PublicationsZ. Nagy, M. Fluckiger, R. Oung, I. K. Kaliakatsos, E. W. Hawkes, B. J. Nelson, K. Harada, E. Susilo, A. Menciassi, P. Dario, and J. J. Abbott, "Assembling Reconfigurable Endoluminal Surgical Systems: Opportunities and Challenges," Int. J. Biomechatronics and Biomedical Robotics, 1(1):3-16, 2009.
Z. Nagy, S. Miyashita, S. Muntwyler, A. K. Cherukuri, J. J. Abbott, R. Pfeifer, and B. J. Nelson, "Morphology Detection for Magnetically Self-Assembled Modular Robots," IEEE/RSJ Int. Conf. Intelligent Robots and Systems, pp. 5281-5286, 2009.
Z. Nagy, R. Oung, J. J. Abbott, and B. J. Nelson, "Experimental Investigation of Magnetic Self-Assembly for Swallowable Modular Robots," IEEE/RSJ Int. Conf. Intelligent Robots and Systems, pp. 1915-1920, 2008.
Z. Nagy, J. J. Abbott, and B. J. Nelson, "The Magnetic Self-Aligning Hermaphroditic Connector: A Scalable Approach for Modular Microrobots," IEEE/ASME Int. Conf. Advanced Intelligent Mechatronics, 2007.
|