Externally applied magnetic fields will enable untethered devices to navigate the body for minimally invasive surgical and diagnostic procedures. There is a class of untethered microrobots that use helical propellers to swim using a method inspired by the propulsion of bacteria. When a piece of magnetic material is attached to the helical propeller, then magnetic fields can be used to rotate the microrobot for propulsion, as well as to steer the microrobot. Tiny magnetic screws can drill through soft tissue using a related method of propulsion. Magnetic spheres can roll on surfaces.
Microrobot Actuation using a Rotating Permanent Magnet
⚠ (:youtube GuTDprWsqc0 loop=1 fs=1:)
This video shows how a swarm of microrobots (here, nine magnetic screws, shown from two orthogonal views) can be manipulated in different ways using a single rotating permanent magnet as the actuation source. The kinematic model (shown here with a red ellipse, run open loop) can be used in the future for motion planning and as an a-priori model for closed-loop control. More details can be found in the paper Kinematic Model of a Magnetic-Microrobot Swarm in a Rotating Magnetic Dipole Field.
⚠ (:youtube xKz5-oqwBR8 loop=1 fs=1:)
This video shows a helical magnetic microswimmer being driven using the nonuniform field of a single rotating permanent magnet. To date, magnetic helical microrobots have always been controlled using nested sets of electromagnetic coils, with the microrobot located at the "sweet spot" in the well-conditioned center of the workspace: a method that works well in laboratory settings, but doesn't scale well for clinical use. This new rotating-permanent-magnetic manipulator has more potential for control of medical microrobots. More details can be found in the paper Wireless Control of Magnetic Helical Microrobots using a Rotating-Permanent-Magnet Manipulator.
Magnetically Driven Screws in Soft Tissue
⚠ (:youtube LS8JXiETEu8 loop=1 fs=1:)
This video shows a small wood screw with a 1-cubic-millimeter permanent magnet rigidly attached to its back end being driven through agar (a soft tissue phantom). The video demonstrates that it is possible to steer magnetic screws, and that they tend to follow circular trajectories. A model that related magnetic, geometric, and tissue properties to the turning radius is a subject of ongoing research in our lab.
⚠ (:youtube -xHcy2nnisY loop=1 fs=1:)
This video shows a small wood screw with a 1-cubic-millimeter permanent magnet rigidly attached to its back end being driven through agar (a soft tissue phantom). In both cases, the screw is simply commanded to move from left to right. In the first half of the video, a slow-moving screw is show at 4X playback speed, showing a stable rightward motion. In the second half of the video, a screw is driven four times faster and shown at actual playback speed, demonstrating an unstable behavior that we can predict analytically using only magnetic properties (that is, without knowing the tissue properties).
Velocity Control of Swimmers with Gravity Compensation
⚠ (:youtube UtB3n-8t8R4 loop=1 fs=1:)
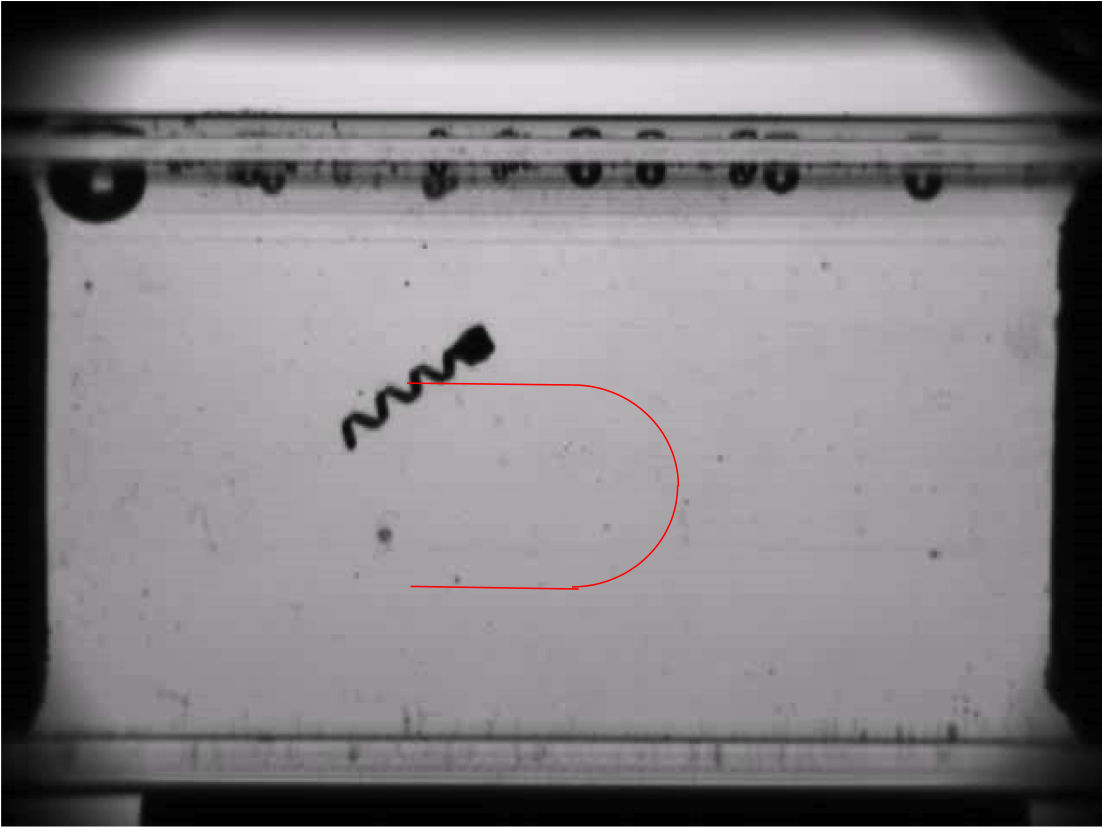
In this video, a magnetic helical swimmer moves sraight from left to right, performs a U-turn maneuver, and then moves straight from right to left, all at a constant forward velocity along the trajectory. The pitch and rotation speed of the swimmer is calculated by our algorithm; it is too unintuitive for a human to handle directly. More detail can be found in the paper Velocity Control with Gravity Compensation for Magnetic Helical Microswimmers.
Artificial Bacterial Flagella
⚠ (:youtube J1ZW0qH_3k8&feature=related loop=1 fs=1:)
In work conducted in Brad Nelson's lab at ETH Zurich, the Artificial Bacterial Flagella (ABF) was created, representing the world's smallest (at the time) artificial swimmer inspired by the propulsion of bacteria. This video shows three ABFs being controlled in a type of swarm, where a single controlled magnetic field is used to control the swarm as a unit. At one point, one ABF gets temporarily separated from the swarm, but naturally returns. The ABFs shown are approximately 40 micrometers long and 3 micrometers in diameter, with a thin square plate of ferromagnetic material at one end. More details can be found in the Applied Physics Letters and Nano Letters papers by Zhang et al.
Selected Publications
B. Chaluvadi, K. M. Stewart, A. J. Sperry, H. C. Fu, and J. J. Abbott, "Kinematic Model of a Magnetic-Microrobot Swarm in a Rotating Magnetic Dipole Field", IEEE Robotics and Automation Letters, 5(2):2419-2426, 2020.
pdf
T. A. Howell, B. Osting, and J. J. Abbott, "Sorting Rotating Micromachines by Variations in Their Magnetic Properties", Physical Review Applied, 9:054021, 2018.
pdf
N. D. Nelson, J. Delacenserie, and J. J. Abbott, "An Empirical Study of the Role of Magnetic, Geometric, and Tissue Properties on the Turning Radius of Magnetically Driven Screws," IEEE Int. Conf. Robotics and Automation, pp. 5352-5357, 2013.
pdf
A. W. Mahoney, N. D. Nelson, E. M. Parsons, and J. J. Abbott, "Non-ideal Behaviors of Magnetically Driven Screws in Soft Tissue," IEEE/RSJ Int. Conf. Intelligent Robots and Systems, pp. 3559-3564, 2012.
pdf
A. W. Mahoney, J. C. Sarrazin, E. Bamberg, and J. J. Abbott, "Velocity Control with Gravity Compensation for Magnetic Helical Microswimmers," Advanced Robotics, 25:1007-1028, 2011.
pdf
T. W. R. Fountain, P. V. Kailat, and J. J. Abbott, "Wireless Control of Magnetic Helical Microrobots using a Rotating-Permanent-Magnet Manipulator," IEEE Int. Conf. Robotics and Automation, pp. 576-581, 2010. Finalist, Best Medical Robotics Paper Award.
pdf
B. J. Nelson, I. K. Kaliakatsos, and J. J. Abbott, "Microrobots for Minimally Invasive Medicine," Annual Review of Biomedical Engineering, 12:55-85, 2010.
pdf
J. J. Abbott, K. E. Peyer, M. Cosentino Lagomarsino, L. Zhang, L. X. Dong, I. K. Kaliakatsos, and B. J. Nelson, "How Should Microrobots Swim?," Int. J. Robotics Research, 28(11-12):1434-1447, 2009.
pdf
L. Zhang, J. J. Abbott, L. X. Dong, K. E. Peyer, B. E. Kratochvil, H. Zhang, C. Bergeles, and B. J. Nelson, "Characterizing the Swimming Properties of Artificial Bacterial Flagella ," Nano Lett., 9(10):3663-3667, 2009.
pdf
L. Zhang, J. J. Abbott, L. X. Dong, B. E. Kratochvil, D. Bell, and B. J. Nelson, "Artificial Bacterial Flagella: Fabrication and Magnetic Control," Applied Physics Lett., 94(064107), 2009.
pdf
Sponsors
Much of this material is based in part upon work supported by the National Science Foundation under Grant Nos. 0952718 and 1435827. Any opinions, findings, and conclusions or recommendations expressed in this material are those of the author(s) and do not necessarily reflect the views of the National Science Foundation.
Many of our projects have benefited from University Outreach Program of Advanced Motion Controls. AMC has supplied many of the amplifiers and power supplies that power our electromagnets, at a significantly reduced price.