
|
|
Perching Mechanisms for Flying RobotsOn this page... (hide) We developed passive graspers that enable flying robotic rotorcraft such as helicopters and quadrotors to perch like a bird without consuming any energy. Those interested in this project (both past and ongoing efforts) should contact Dr. Mark Minor.
Avian-Inspired Perching MechanismsSongbirds perch using a tendon that causes the foot to close when the leg collapses. We have developed graspers inspired by the feet and legs of songbirds that enable flying robotic rotorcraft such as helicopters and quadrotors to perch like a bird. The mechanisms uses only the weight of the robot to maintain the grip on the perch. When the robot lifts off, the feet automatically release. 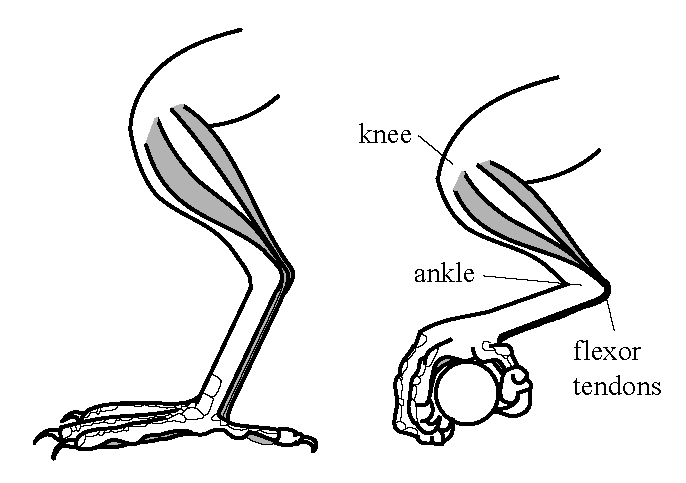 
Sarrus-Linkage Perching MechanismsWe have developed a new mechanism to accomplish the same passive perching as our avian-inspired design, but which is not bioinspired. Our new mechanism uses a Sarrus linkage, rather than a collapsing leg and tendon, to convert the robot's weight into grip force. More detail coming soon. PublicationsM. L. Burroughs, K. B. Freckleton, J. J. Abbott, and M. A. Minor, "A Sarrus-Based Passive Mechanism For Rotorcraft Perching," J. Mechanisms and Robotics, available online.
C. E. Doyle, J. J. Bird, T. A. Isom, J. C. Kallman, D. F. Bareiss, D. J. Dunlop, R. J. King, J. J. Abbott, and M. A. Minor, "An Avian-Inspired Passive Mechanism for Quadrotor Perching," IEEE/ASME Trans. Mechatronics, 18(2):506-517, 2013.
C. E. Doyle, J. J. Bird, T. A. Isom, C. J. Johnson, J. C. Kallman, J. A. Simpson, R. J. King, J. J. Abbott, and M. A. Minor, "Avian-Inspired Passive Perching Mechanism for Robotic Rotorcraft," IEEE/RSJ Int. Conf. Intelligent Robots and Systems, pp. 4975-4980, 2011.
CollaboratorsThis research was done in collaboration with Dr. Mark Minor, who continues to work in this area. |