
|
|
Haptic Interface Design and ControlOn this page... (hide) Untethered Magnetic Haptic InterfacesSelected PublicationsJ. B. Brink, A. J. Petruska, D. E. Johnson, and J. J. Abbott, "Factors Affecting the Design of Untethered Magnetic Haptic Interfaces," IEEE Haptics Symp., pp. 107-114, 2014. Best Paper Award. pdf CollaboratorsHaptic Interaction with Admittance-Type DevicesHaptic devices are typically robots of the impedance type, meaning that they are designed to have very small amounts of inertia and friction, such that the human user experiences only the forces output by the virtual environment. Admittance-type robots are heavily geared with significant amounts of inertia and friction, which makes them well suited for slow, precise movements, but they are rarely used as haptic devices. When they are used as haptic devices, the human interacts with a force sensor on the device, and this sensed force is commanded into controlled movement, leading to a significantly different experience than when using an impedance-type device. Admittance-type robots have proven to be effective as robot-assistance devices, such as the Johns Hopkins University Steady-Hand microsurgical robot, and more recently the University of Utah Active Handrest. Admittance-type devices also show promise as human input devices for precise master-slave telemanipulation systems. 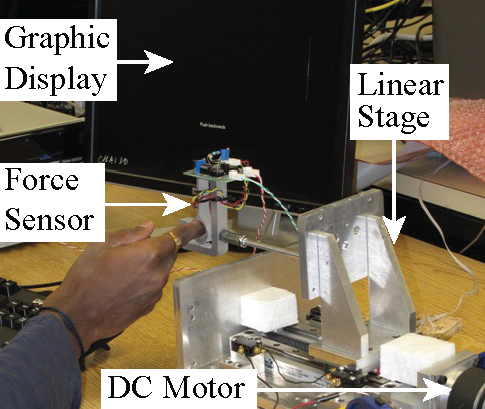 We are exploring how humans interact with admittance-type device during precise manipulation tasks. Specifically, we are considering how the allowable speed of the device, as well as the control-system implemented, affect the user's ability to precisely control the movement of the device. In our first study, we explicitly considered force-control ability when presented with visual feedback of target force and applied force.
Selected PublicationsT. K. Arbuckle, 2012, "Velocity-Control Performance with a Fingertip Controlled Admittance-Type Haptic Device," Master's Thesis, Department of Mechanical Engineering, University of Utah, Salt Lake City, Utah.
M. Nambi, W. R. Provancher, and J. J. Abbott, "On the Ability of Humans to Apply Controlled Forces to Admittance-Type Devices," Advanced Robotics, 25:629-650, 2011.
Collaborators |