On this page we demonstrate how two Novint Falcons, inexpensive commercially available haptic devices, can be modified to create a reconfigurable five-degree-of-freedom (5-DOF) haptic device for less than $100 (in addition to the price of the two Falcons, which at last check were selling for $250). The device is intended as an educational tool to allow a broader range of students to experience force and torque feedback, rather than the 3-DOF force feedback typical of inexpensive devices. Commercially available 5- and 6-DOF devices exist and feel great, but they can easily run $50,000 or more. Our 5-DOF device doesn't feel as nice, but at 1% of the price, it can be a great educational and research tool. Plus, all of the modifications described here are nondestructive, so you can always easily revert your Falcons back to their original condition.
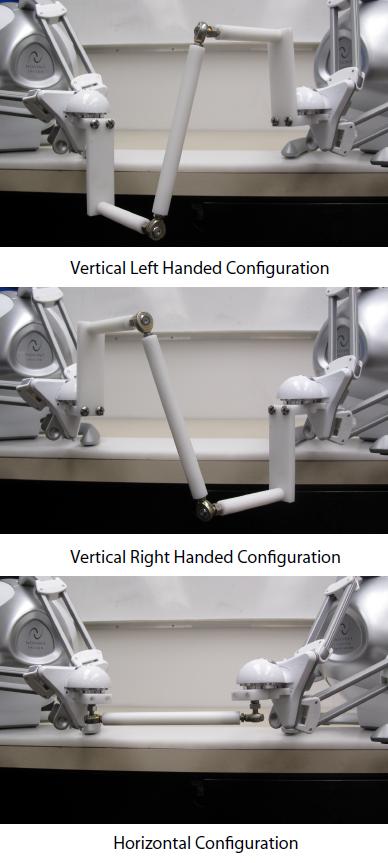
The pictures on the right show the different configurations of the 5-DOF device. Each configuration uses the same stylus, so changing configurations is quick and easy. Since the Novint Falcons have limited range of motion, the best stylus configuration must be chosen for a given application. On this page, we explain how to build the device for yourself, we explain how to implement a 5-DOF force/torque control system that makes the two Falcons act in concert as a single haptic device, and we explain how to implement gravity compensation to make the now-even-heavier Falcons feel light. The gravity-compensation algorithm can also be applied to standard Falcons without our 5-DOF modifications.
Through the course of this project, we developed a gravity-compensation routine for the Falcon. Even if you don't want to build the modified 5-DOF device, the addition of gravity compensation makes the heavy Falcon feel much nicer. The publication and software below include code for both the 5-DOF and original 3-DOF device.
Publications
A. V. Shah, S. Teuscher, E. W. McClain, and J. J. Abbott, "How to Build an Inexpensive 5-DOF Haptic Device using Two Novint Falcons, In A. M. L. Kappers et al. (Eds.): EuroHaptics 2010, Part I, LNCS 6191, pp. 136-143, 2010.
pdf
Instructions
If you use the device or algorithms described on this page, we ask that you please cite the publication. Thanks!
Hardware
- Buy two Novint Falcons.
- Download the latest Novint Falcon Drivers and install them into your computer. Connect the Novint Falcons to the computer and try to play a game from the Novint Falcon game CD which comes with the whole package to check that the Falcons are working properly.
- Modifications to the Novint Falcons are based on the construction of the original Falcon end-effector.
- Download this file to see how to make changes to Falcon end-effector.
- To make the new prototype download the parts list and buy the parts from McMaster-Carr or some equivalent source.
- After buying the parts, you can make the new prototype by first reading the instructions and then downloading the Solid Works package, which included mechanical drawings of all the parts. You can fabricate the new parts on conventional lathe and drilling machines.
Software
- Install Microsoft Visual Studio 2008 in Windows, having specifically Visual C++ environment applied when installing.
- Download the CHAI3D package (Version 2.0) for Windows.
- Download the class files and the source files required to run the code.
- Download this file, which will show you how to add those class files and the source files to the CHAI3D package, which lets the newly built 5-DOF device communicate with the computer and it lets you feel force and torque feedback with gravity compensation for all the different configurations of the 5-DOF end-effector.
- Using the newly made 5-DOF device you can feel gravity compensation, force feedback, and torque feedback. In addition, using a single unmodified falcon, which is 3-DOF device, you can only feel gravity compensation and force feedback.
- Download this file, which will show you how to toggle on/off the different effects for the newly made 5-DOF device and for a single falcon.
Caution
- You may find that after you run the code the stylus position on your screen looks different then the stylus position you are holding in your hand. This happens due to the fact that we are not able to know before hand which Falcon is recognized first and which one is recognized second by the computer. So we can easily solve the problem by just swapping the two Falcons' positions. This will only need to be done once.
- After turning on the gravity compensation code we feel that the end-effector is much lighter and moving more freely, but due to motor inaccuracies across Falcon motors, we are not able to give exact motor torques, so we are not able to get exact desired gravity compensation throughout the workspace. It would be possible to calibrate the motors and include one extra gain on the motor output torques in the code to scale the output of a motor that deviates significantly from the average.
